高所での力強い作業を実現!推力ベクタリングシステム搭載飛行ロボット
理工学部 ロボティクス学科
教授 下ノ村 和弘
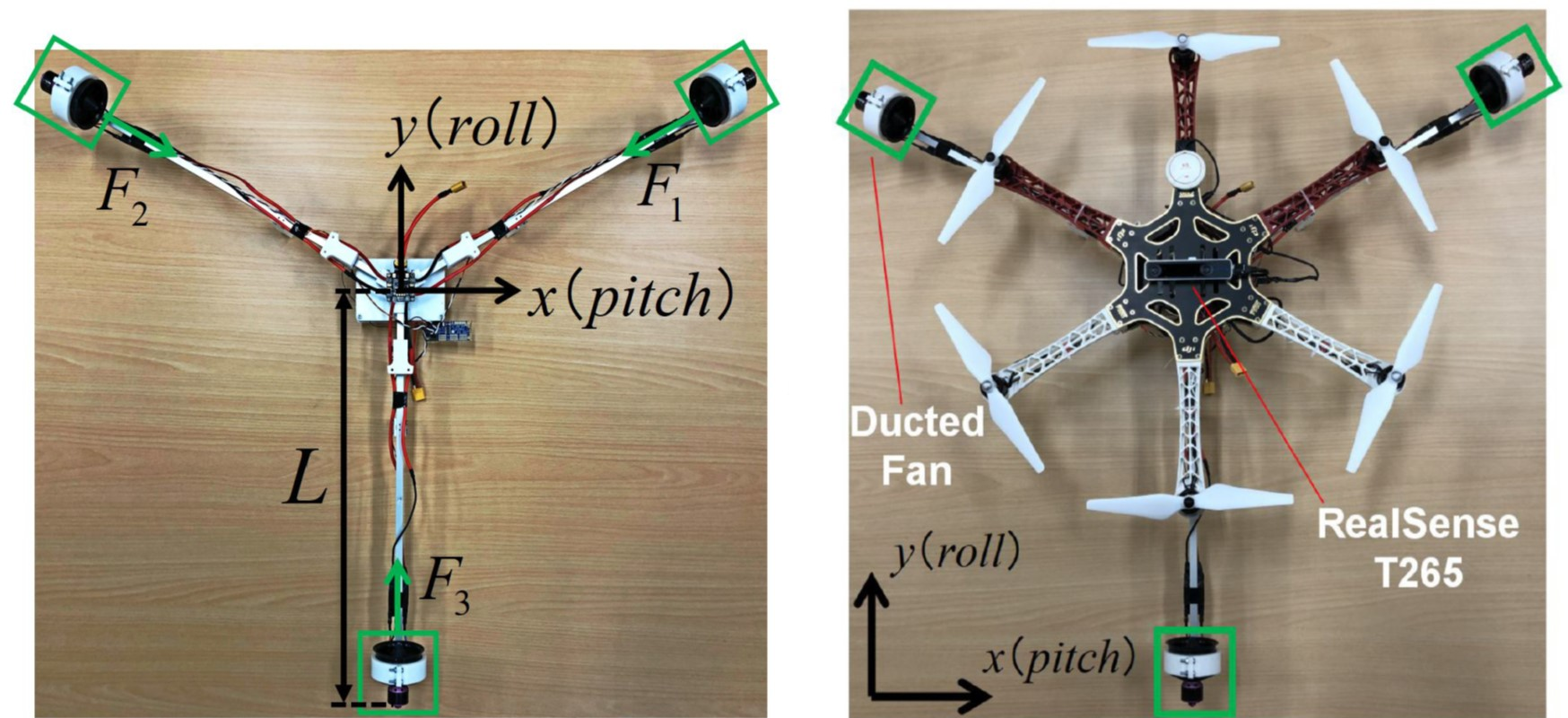
機体姿勢を水平に維持したまま任意の方向へ飛行が可能


新規性・優位性
- ●通常のマルチロータUAVに比べて高精度な位置決めと水平任意方向への安定した力の発生
- ●3つのダクテッドファンを水平方向に90度回転させることで、捩じり作業に対応
- ●チルトプロペラ方式のような他手法に比べてより大きな力やトルクを発生
- ●従来は困難であった高所での大出力作業のロボット化
応用・活用例
高所において比較的大きな力やトルクが必要となる作業の無人化、ロボット化。具体例として以下のような作業が想定される。
- ● 構造物の壁面厚さ計測や打音検査作業
- ● 工場やプラントにおけるバルブ開閉などの設備操作作業
- ● 住宅や商業施設、インフラ建築物の高圧洗浄作業
