負圧効果板による壁/天井などへの効率的吸着法
~ベルヌーイの定理によるプロペラ式移動ロボットの効率的な壁/天井への吸着~
立命館グローバル・イノベーション研究機構 機構長代理
特別招聘研究教授 川村 貞夫
研究内容
水中ロボットやドローンなどが、壁面、天井、ダム堤体等に接触して行う作業が多く見られる。風や水流に影響されず作業を実施するためには、対象物にロボット等が機械的に接触することが有利である。また、ロボットが対象物に力を作用するためには、反力を打ち消すに十分な押しつけ力を発生する必要がある。
従来は・・・
ロボットの移動用のプロペラ式スラスタを押し付け力に利用する場合、スラスタの最大値によって、力の上限が決まっていた。
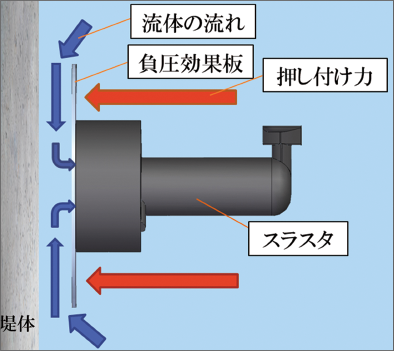
プロペラ駆動部と対象物との間に負圧効果板を設置
ベルヌーイ効果によって負圧となることを利用して、吸着力を効果的に発生させて押しつけ力を増大。他の負圧式に比して、対象面との間に隙間を有しても有効な方法であることから、吸着状態を維持してロボットが移動する場合に有効となる。

企業への セールスポイント
●飛行用、移動用のプロペラ式スラスタを、利用した吸着力増加法
●単純に板を付加するのみでその他の駆動源や機構は不要
応用・活用
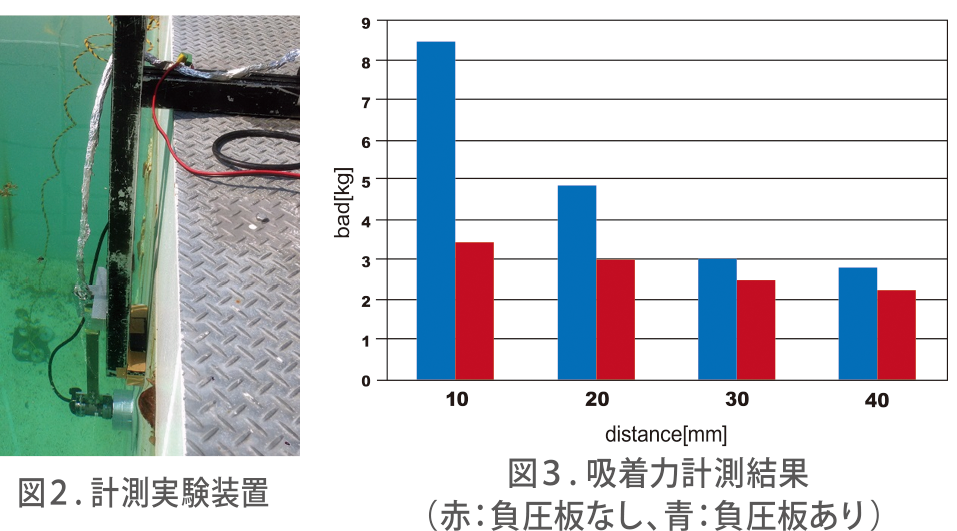
本方式の水中での利用を目的として、図2の計測装置による基礎実験を行った。実験結果は図3に見られるように、負圧効果板がある場合には、スラスタ単体に比して、ギャップ長が10㎜において、3倍近くの吸着力を発生できることが分かった。
本方式の利用例としてダム堤体検査ロボットを図4に示す。移動用に6個のプロペラ式スラスタがあり、4個を中央に配置して、ロボットの前後進、ヨー角、ピッチ角を実現する。 実験水槽によるロボットの壁面上での移動を図5に示す。

特許情報
特願2016-033248/特願2015-069902
