高空間分解能接触・近接複合センサ
~画像による対象物位置、形状、接触、近接情報の同時取得~
理工学部 ロボティクス学科
教授 下ノ村 和弘
研究内容
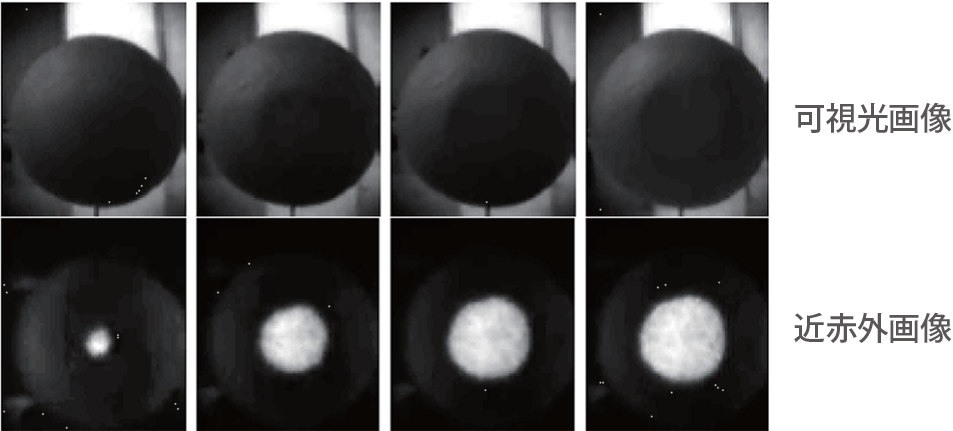
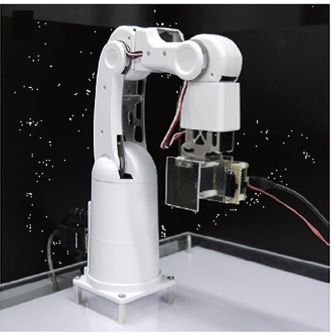
本技術は、導光板を用いた接触検出およびステレオ視に基づく三次元形状計測を、ひとつの小型デバイスで同時に実行する。小型複眼カメラを用いてこれら接触・近接情報をそれぞれ、赤外画像および可視光画像として取得する。各画像は約300×300画素であり、従来センサに比べ格段に高い空間解像度(83μm分解能で約90000点の計測点)をもつ。センサは小型(およそ4cm×4cm×3cm)であり、ロボットハンドの手先や指先に装着可能である。

応用例
ロボットハンドによる物体把持・操作のための触覚センサ
・食品のような柔らかく変形する物体のハンドリング
・チップ電子部品のような微小な物体のハンドリング
・把持対象物のハンド内位置・姿勢計測に基づいた組立て作業(コネクタ挿入など)
