人並みの触覚を実現するMEMS触覚センサ
情報理工学部
教授 野間 春生
研究内容
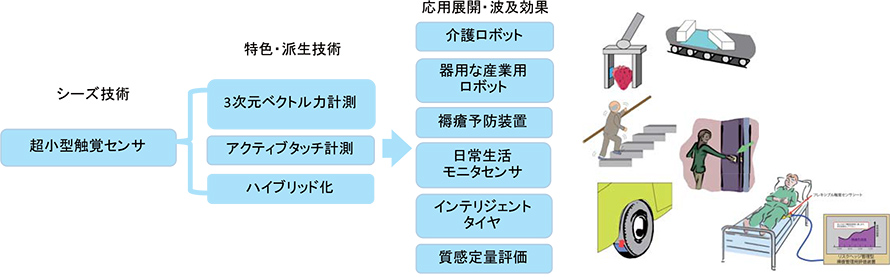
介護ロボットのような人と共存しサービスを提供するヒューマンサポートロボットに十分な安全性と作業性を与えるためには、器用な触覚機能が必要である。MEMS技術を応用し、人間並の機能を有しロボットの指先に実装できる超小型多軸触覚センサの開発を行った。
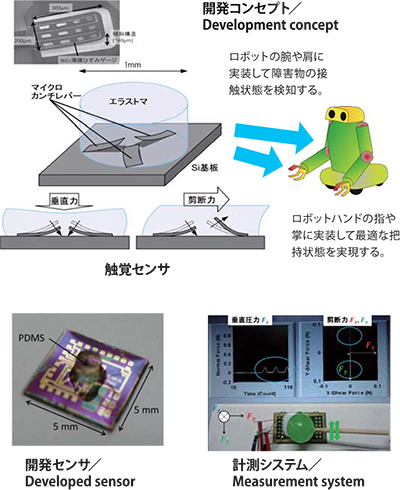
開発したセンサは、垂直力と水平方向2軸の剪断力に対して感度を持ち、超小型のカンチレバーをエラストマで被った構造をしている。エラストマの上面に垂直力と剪断力をかけると、エラストマごとMEMS構造が変形し、その変形状態を電気的に検知する。行列計算を用いたアルゴリズムにより、垂直力と剪断力を同時に分離して計測することを可能とした。
試作した触覚センサは検知部の直径が約1㎜、チップの大きさが最小5㎜角であり、ロボットの指先にも搭載可能な大きさを実現できた。
研究内容
介護ロボットのような人と共存しサービスを提供するヒューマンサポートロボットに十分な安全性と作業性を与えるためには、器用な触覚機能が必要である。MEMS技術を応用し、人間並の機能を有しロボットの指先に実装できる超小型多軸触覚センサの開発を行った。
開発したセンサは、垂直力と水平方向2軸の剪断力に対して感度を持ち、超小型のカンチレバーをエラストマで被った構造をしている。エラストマの上面に垂直力と剪断力をかけると、エラストマごとMEMS構造が変形し、その変形状態を電気的に検知する。行列計算を用いたアルゴリズムにより、垂直力と剪断力を同時に分離して計測することを可能とした。
試作した触覚センサは検知部の直径が約1㎜、チップの大きさが最小5㎜角であり、ロボットの指先にも搭載可能な大きさを実現できた。
応用例