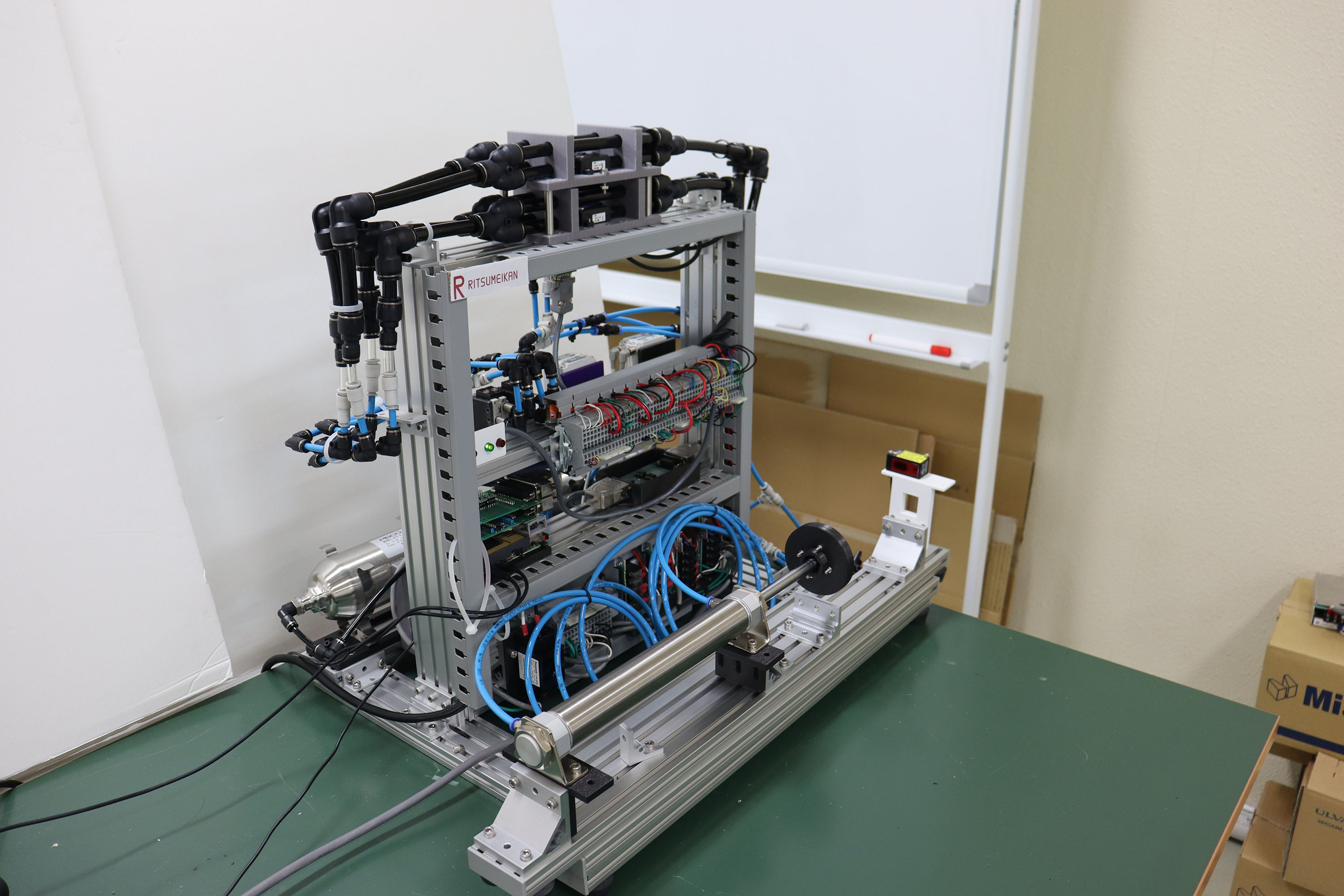
変位センサ不要で高速位置制御を実現!空気圧駆動アクチュエータシステム
総合科学技術研究機構
教授 清水 正男
立命館グローバル・イノベーション研究機構 機構長代理
特別招聘研究教授 川村 貞夫
フローセンサを用いた空気圧駆動アクチュエータの高精度の位置制御技術
高校生時代に習った方も多い理想気体の状態方程式(PV=nRT)を応用した、空気圧シリンダやソフトアクチュエータの位置制御を発明しました。
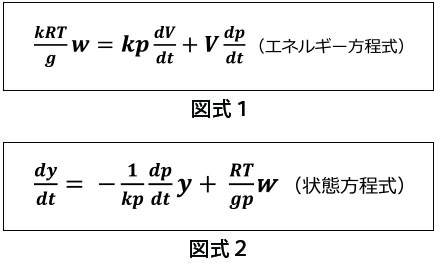
アクチュエータの入出力ポートに質量流量計と圧力計を設置計測し、状態方程式からアクチュエータに導入さる空気の体積を逐次計算します。この体積変化を制御系にフィードバックし電磁バルブを開閉させることで、アクチュエータの位置を制御します。方法としては、質量流量(w)と絶対圧力(p)を同時計測することで、以下のエネルギー方程式を動的に解き(計算し)エアーシリンダー等の高精度位置決めを行います。
エネルギー方式(図式1参照)
k:比熱比,R:気体定数,T:絶対温度,g:重力加速度,p:絶対圧力,V:体積。例えば、エアーシリンダーの場合、Vをシリンダ断面積で割ることで移動距離yを得ます。ここから、
状態方程式(図式2参照)
を求め、実時間で計算することで位置推定を行います。


新規性・優位性
伸縮性の高い圧力媒体(空気等)を用いたアクチュエータの高速位置制御を可能にしました。
応用・活用例
●廃炉作業など電子機器(位置センサ等)の設置が困難な場所でも使用できる。
●血圧計の腕帯に応用できる。
●アクチュエータ近傍に位置センサ(電子系)を配しなくても位置制御が行えるので、電界磁界の影響を受ける場所での空気圧アクチュエータの位置制御が行うことができる。
●樹脂等でソフトアクチュエータ(グリッパー等)を構成することで、食品のような脆弱物のハンドリングやMRIでの固定具にも応用が期待できる。
本研究は、内閣府が進める「戦略的イノベーション創造プログラム(SIP)第2期/フィジカル空間デジタルデータ処理基盤」(管理法人:NEDO)によって実施されました。
