柔らかな人工筋肉マイクロマシンが生み出すデバイスたち
~小さくともパワフルなラバー製圧力駆動アクチュエータとその応用~
理工学部 機械工学科
バイオメディカルデバイス研究センター
教授 小西 聡
研究概要
圧力駆動で伸縮動作や曲げ動作をする薄膜人工筋肉マイクロマシンを紹介する。シリコンラバー製のマイクロバルーンの膨張を活用しており、5mm×5mm、薄さ0.4mmのバルーンを有するマイクロマシンは印加圧力80kPa 時に発生力1.2N を出力可能である。MEMS技術をシンプルに活用した高スループット生産技術と構造の微細化、薄膜化、そして機能の集積化により提供するエレメントは、コンパクトなシステム構成を可能とする。オフ時には非常に柔らかく、オン時には圧力駆動によるパワフルで安全な出力が可能である。これまでに内視鏡用アクチュエータ等の低侵襲性が求められる場面での応用展開を進めてきているが、ワイヤー駆動の代替など産業応用にも可能である。
研究内容
伸縮動作や曲げ動作をする薄膜人工筋肉マイクロマシン
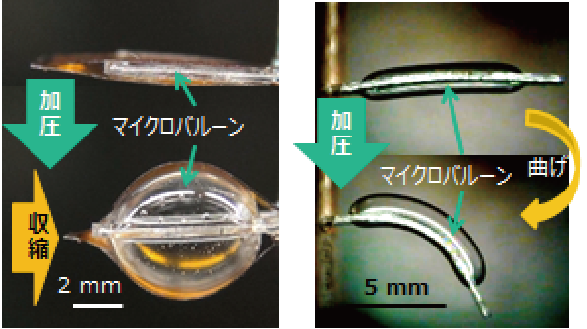
伸縮動作や曲げ動作をする薄膜人工筋肉マイクロマシンを紹介する。右図は、エレメントの伸縮動作(右)と曲げ動作(左)の側面からの写真である。シリコンラバー製のマイクロバルーンの加圧膨張を活用して動作している。動作形態として、伸縮動作、曲げ動作、さらにはねじり動作などを提供可能である。製作にはラバーの成型技術を用いており、一括大量微細加工・生産が可能である
活用・応用例
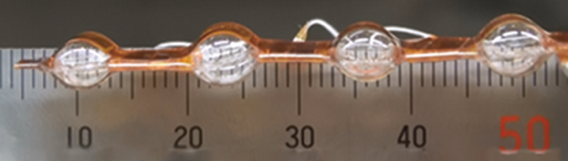

伸縮動作マイクロマシンは、例えば内視鏡等のワイヤー駆動機構の代替技術として有効。5mm×5mm、薄さ0.4mmのバルーンを有する伸縮動作マイクロマシンは、印加圧力80kPa 時に発生力1.2N を出力可能で、更に複数のマイクロマシンを連結したり、多関節化したりすることも可能。

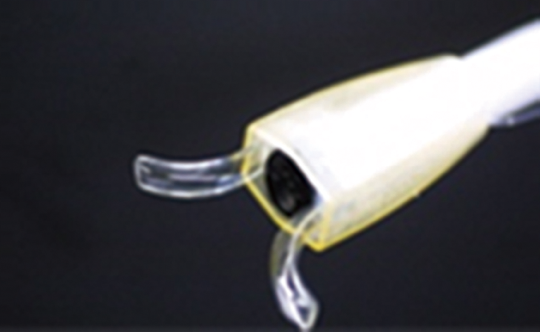
曲げ動作マイクロマシンは、人工筋肉として動かしたい構造に分散して埋め込んで、多自由度動作を実現することができる。マイクロハンドはその典型例で、11自由度の独立動作を実現している。一本の指の長さは7mm、厚みは100μmである。オフ時に柔らかいことを利用し、例えば内視鏡の前面に装着し、体内挿入時には柔らかく、体内では手術支援アクチュエータとしてパワフルに機能させるといった利用も可能である。
セールスポイント
小さくて(数mm)、薄くて(サブmm)、軽くて(数百mg)、パワフル(数N)なアクチュエータとして開発した人工筋肉マイクロマシン。省スペース化、ウェアラブル化への対応の観点からも魅力的で、安全なアクチュエータとしての活用が期待される。シンプルな工程で、一括大量微細加工・生産が可能である。
特許情報
特開2013-212258/特開2014-132960/第4406693号
