優しい把持が可能なソフトグリッパーと自動システム
柔らかくて形状のばらつきが大きいものの把持を実現!
理工学部 ロボティクス学科
准教授 王 忠奎
研究内容
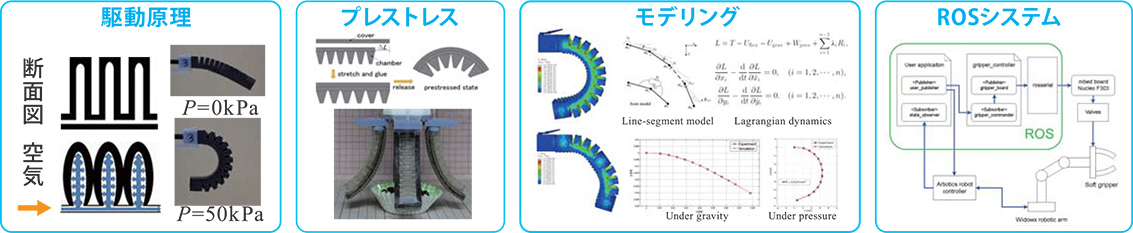
本技術は、空気圧で駆動する柔らかい材料(ゴム系)を用いたロボットグリッパーに関するものである。崩れやすい対象物のばらつきに対応でき、かつ制御しやすく、周りの環境と接触しても安全性が高い。また、空気圧で駆動するため衛生面の問題も少ない。構造も簡単なので、低コストで大量生産を行い、提供することを目指す。また、ROS(Robot Operating System)を用いて、ソフトグリッパー、ロボットアーム、カメラを統合し、自動化システムを構築している。
応用例
今進めている応用研究は弁当のパッキング作業の自動化を第一の目標とし、小さな紙カップに入れた食材や、ゆで卵、パン、鮭の塩焼き、唐揚げ、冷凍ブロッコリーなどの食材を掴んで弁当箱の所定の位置にパッキングすることを可能にするものである。第二の目標は、ROSで自動化システムを構築することである。これらの実現でロボットが活用されることで、近年の飲食店や食品工場での人手不足や人件費高騰の解消につなげることが期待できる。

セールスポイント
- ●形状のばらつきが大きいものや柔らかくて崩れやすいものを把持可能
- ●構造が簡単かつゴム材料で構成され、低コストで製作可能
- ●システムがROSで構築され、システム統合や展開することが便利
